Puntos y vectores
El entorno conforma el espacio Euclídeo .
Coordenadas homogéneas:
Se compone de tres coordenadas cartesianas más una cuarta coordenada que indica que si se trata de un punto o vector. Un 1 indica que se trata de un punto, un 0 indica que es un vector.
Puntos → P = Representa una posición.
Vectores → u = Representa una dirección y sentido.
Transformación de coordenadas:
Para pasar de coordenadas homogéneas a coordenadas cartesianas dividimos la matriz de la coordenada homogénea por ‘w’ (w 0). Esto se denomina normalización.
P = ⇒ P =
Coordenadas homogéneas / Coordenadas cartesianas
Operaciones:
-
Módulo de un vector: se multiplica por su traspuesta. · U
-
Suma de vectores: Vector 𝑼 + Vector 𝑽 = Vector 𝑼 + 𝑽
- Suma de punto y vector: Punto 𝑷 + Vector 𝑼 = Punto 𝑸
- Resta de puntos: Punto 𝑸 - Punto 𝑷 = Vector 𝑼
Producto escalar:
El resultado es un escalar que se define como: U * V = =
U * V = · V
U * V = ||U|| · ||V|| · cos()
cos() =
Si U * V > 0 ⇒ > 0 ⇒ < 90º (Ángulo agudo).
Si U * V < 0 ⇒ < 0 ⇒ > 90º (Ángulo obtuso).
Si U * V = 0 ⇒ = 0 ⇒ = 90º (Los vectores U y V son perpendiculares).
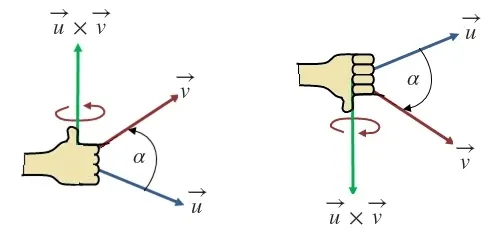
Producto vectorial:
El resultado de un producto vectorial es un vector con:
- Módulo: ||U x V|| = ||U|| · ||V|| ·
- Dirección: perpendicular a U y a V.
- Sentido: dado por la regla de la mano derecha
U x V = - V x U
U x V =
Si U y V se encuentran en el plano Z = 0 (por ejemplo): U x V =
Sistemas de referencia
La posición de un objeto depende de cómo se mire. La determinación de las tres coordenadas de un punto se realiza por medio de un sistema de referencia:
SR = {Q, U, V, W}, siendo Q el punto origen del sistema de referencia y {U, V, W} es la base ortonormal (tres vectores unitarios y perpendiculares dos a dos).
Sistema de referencia universal (SRU):
Ecuación paramétrica de la recta
Viene determinada por un parámetro t:
Dado dos puntos A y B por los que pasa:
C(t) = (1-t) · A + t · B =
Si 0 t 1, C(t) es el segmento recta que une los puntos A y B.
Ecuación del plano (implícita)
Un plano se puede definir mediante 3 puntos o 1 punto y el vector normal.
Si U y V son vectores del plano, el vector normal de este último es N = U x V
Ecuación que da los puntos del plano, siendo X un punto genérico :
Un punto Q genérico pertenece al plano si N * PQ = 0
Un plano divide al espacio en dos semi espacios y . Dado un punto Q:
- Q pertenece al plano si y solo si N * PQ = 0 (ángulo recto).
- Q pertenece al si y solo si N * PQ > 0 (ángulo agudo).
- Q pertenece al si y solo si N * PQ < 0 (ángulo obtuso).
es el semi espacio hacia donde apunta el vector normal al plano.
Baricentro
Dado un conjunto de puntos como coordenadas homogéneas normalizadas, el baricentro se define como el punto cuyas coordenadas vienen dadas por: